
Variable Recruitment of Fluidic Artificial Muscles – Design and Modeling
Abstract
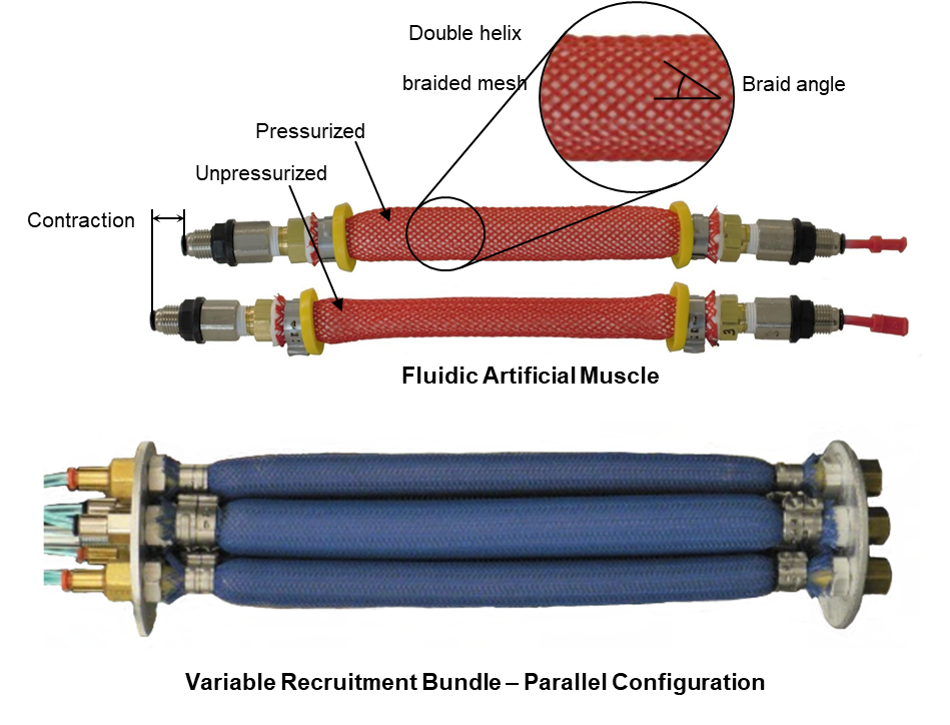
Fluidic artificial muscles (FAMs) have the potential for a wide range of uses, ranging from injury rehabilitation to high-powered hydraulic systems. Characterized by high power-to-weight ratios, relatively inexpensive fabrication, and natural compliance, artificial muscle are an interesting actuator for researchers. Recently, we have extended the use of FAMs to multi-chambered bundles with variable recruitment functionality. Multiple FAMs are bundled together in parallel to form a single actuator. Compared to a single FAM with equivalent cross-sectional area, the variable recruitment bundle can achieve higher bandwidth, efficiency, and force sensitivity.
Research Aims
1. Understanding the interaction effects between FAMs within a bundle and their impact on overall bundle performance.
2. Design and optimization of biologically inspired pennate muscle topology.
3. Electrohydraulic modeling and analysis of variable recruitment bundle system.
4. Design of a cyber-physical robotic limb emulator to allow for the testing of different bundle configurations, topologies, and variable recruitment control schemes.
Examples
Three pairs of FAMs shown here are arranged in a bipennate configuration on low-friction linear rails and pneumatically pressurized to demonstrate individual FAM actuation behavior with respect to bundle contractile motion. The illustrated test platform is an attempt to mimic connective tissue found in organic muscles capable of adapting to volumetric changes during individual fiber contraction. Pressurized FAMs in this condition allow radial expansion of FAMs to dominate and can enable the bundle to become an extensible actuator.
Current Researchers
David Kim

Nicholas Mazzoleni
Emily Duan
Publications
Duan, Emily; Bryant, Matthew., “Implications of spatially constrained bipennate topology on fluidic artificial muscle bundle actuation,” MDPI, Actuators, 2022.
Mazzoleni, Nicholas; Kim, Jeong Yong; Bryant, Matthew., “Motor unit buckling in variable recruitment fluidic artificial muscle bundles: implications and mitigations,” IOPscience, Smart Materials and Structures.
Vemula, Dheeraj; Kim, Jeong Yong; Mazzoleni, Nicholas; Bryant, Matthew. “Design, analysis, and validation of an orderly recruitment valve for bio-inspired fluidic artificial muscles,” IOPscience, Bioinspiration & Biomimetics.
Duan, Emily; Bryant, Matthew., “Design of pennate topology fluidic artificial muscle bundles under spatial constraints,” ASME, Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2021.
Kim, Jeong Yong; Mazzoleni, Nicholas; Bryant, Matthew., “Free strain gradient reversal of a variable recruitment fluidic artificial muscle bundle,” SPIE, Smart Structure + Nondestructive Evaluation, 2021.
Kim, Jeong Yong; Mazzoleni, Nicholas; Bryant, Matthew., “Modeling of Resistive Forces and Buckling Behavior in Variable Recruitment Fluidic Artificial Muscle Bundles,” MDPI, Actuators, Special Issue: Artificial Muscles and Soft Actuation, 2021.
Chapman, E. Edwards; Bryant, Matthew., “Design and Analysis of Electrohydraulic Systems for Underwater Systems Utilizing Fluidic Artificial Muscle Actuators,” Bioinspired Sensing, Actuation, and Control in Underwater Soft Robotic Systems, 2020.
Kim, Jeong Yong; Mazzoleni, Nicholas; Bryant, Matthew., “Development and Demonstration of an Orderly Recruitment Valve for Fluidic Artificial Muscles,” ASME, Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2020.
Kim, Jeong Yong; Mazzoleni, Nicholas; Bryant, Matthew., “Investigation of Resistive Forces in Variable Recruitment Fluidic Artificial Muscle Bundles,” SEM, International Modal Analysis Conference (IMAC), 2020.
Mazzoleni, Nicholas; Kim, Jeong Yong; Bryant, Matthew., “The effect of resistive forces in variable recruitment fluidic artificial muscle bundles: a configuration study,” SPIE, Smart Structure + Nondestructive Evaluation, 2020.
Jenkins, Tyler; Bryant, Matthew., “Pennate actuators: force, contraction and stiffness,” IOPscience, Bioinspiration & Biomimetics, 2020.
Vemula, Dheeraj; Bryant, Matthew., “Bio-inspired orderly recruitment valve for fluidic artificial muscles,” SPIE, Smart Structure + Nondestructive Evaluation, 2019.
Jenkins, Tyler; Bryant, Matthew., “Variable stiffness soft robotics using pennate muscle architecture,” SPIE, Smart Structure + Nondestructive Evaluation, 2019.
Chapman, E. Edwards; Jenkins, Tyler; Bryant, Matthew., “Design and analysis of electrohydraulic pressure systems for variable recruitment in fluidic artificial muscles,” IOPscience, Smart Materials and Structures, 2018.
Chapman, E. Edwards; Bryant, Matthew., “Bioinspired passive variable recruitment of fluidic artificial muscles,” SAGE, Journal of Intelligent Material Systems and Structures, 2018.
Chapman, E. Edwards; Jenkins, Tyler; Bryant, Matthew., “Modeling and analysis of a meso-hydraulic climbing robot with artificial muscle actuation.” IOPscience, Bioinspiration & Biomimetics, 2017.
Jenkins, T., Chapman, E., and Bryant, M., “Bio-inspired online variable recruitment control of fluidic artificial muscles,” Smart Materials and Structures, 2016.
Chapman, E. Edwards; Jenkins, Tyler; Bryant, Matthew., “Chapman, E. Edwards; Jenkins, Tyler; Bryant, Matthew,” ASME, Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2016.
Jenkins, T., Chapman, E., and Bryant, M., “Control approach development for variable recruitment artificial muscles,” Proc. SPIE Conference on Smart Structures and Materials: Active and Passive Smart Structures and Integrated Systems, April 15, Las Vegas, NV, 2016.
E. Chapman, M. MacLeod, and M. Bryant, “Electrohydraulic modeling of a fluidic artificial muscle actuation system for robot locomotion,” in Proc. ASME SMASIS 2015, Colorado Springs, CO, Sept. 21-23, 2015.
Funding Sources
Faculty Early Career Development Program (CAREER) of the National Science Foundation (NSF Award Number 1845203)
National Science Foundation Graduate Research Fellowship Program (Grant No. 1650114)
2020 NC Space Grant Graduate Research Fellowship Program
