
Multi-terrain Amphibious ARCtic explOrer (MAARCO)
Abstract
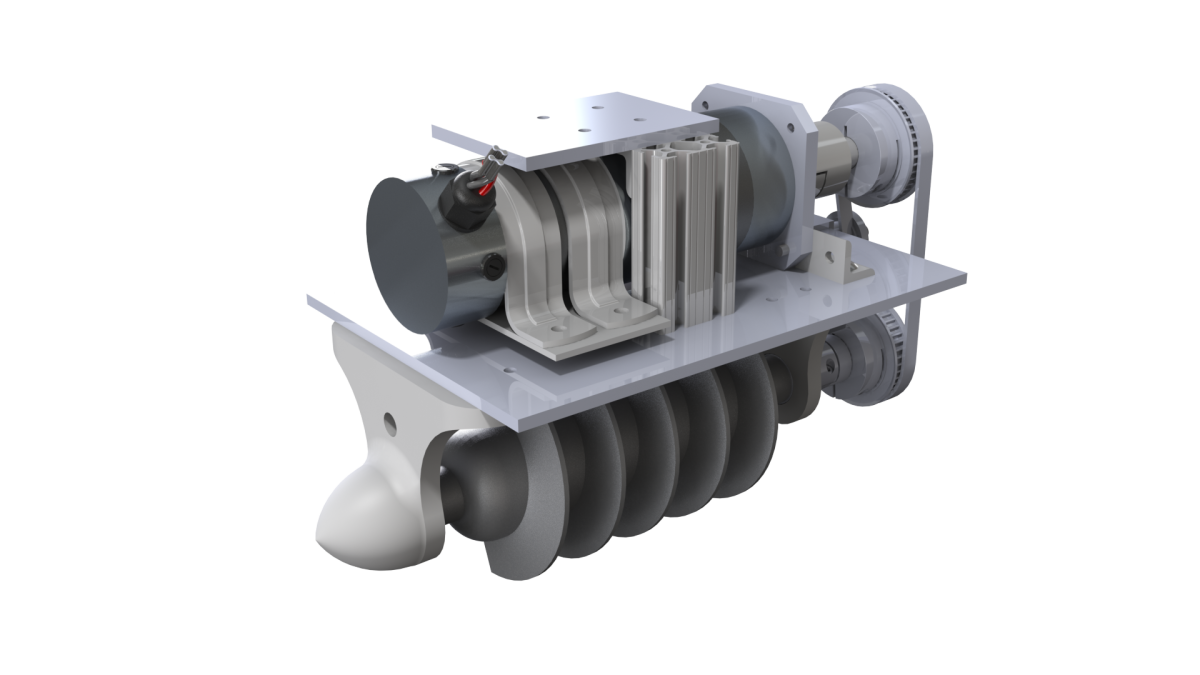
The MAARCO project aims to create fundamental innovation in understanding and controlling the dynamics, energetics, and autonomous navigation capabilities of a truly amphibious and multi-terrain robot capable of moving seamlessly across the diverse terrains found in the Arctic. The rapidly changing Arctic climate presents unique and heterogeneous combinations of terrain, ranging from snow and ice to firm, frozen permafrost, through wet, spongy thawed permafrost, to partially ice-covered lakes, to flowing mixtures of sea ice and open ocean. The proposed research will create a modeling and analysis framework for understanding and controlling the interactions between helical drives and the terrain conditions found in the Arctic. This work seeks to establish fundamental relationships between desired locomotion dynamics and the design configuration, control strategy, and energy budgeting of a helical drives-based rover that can operate on all terrain conditions in the Arctic. The MAARCO project will benefit society by enabling climate change research in inaccessible regions in the Arctic, exploration of planets and moons in the solar system, and enhancing understanding of automated locomotion of robots on a wide range of surface and terrain conditions.
Research Aims
1. Understand the locomotion dynamics and energetics of helical drives while operating on terrain conditions found in the arctic.
2. Create and demonstrate a framework to derive optimal control strategy, energetics, and design parameters based on mission requirements and environments of operation.
3. Validate and demonstrate locomotion dynamics, control performance, and energetics of an integrated rover system in field conditions.
Current Researchers

Ryan Lynch
Publications
Funding Sources
National Science Foundation Award No.